Sourccey Specifications
Builder-first coverage of the mechanical, electrical, and software stack.
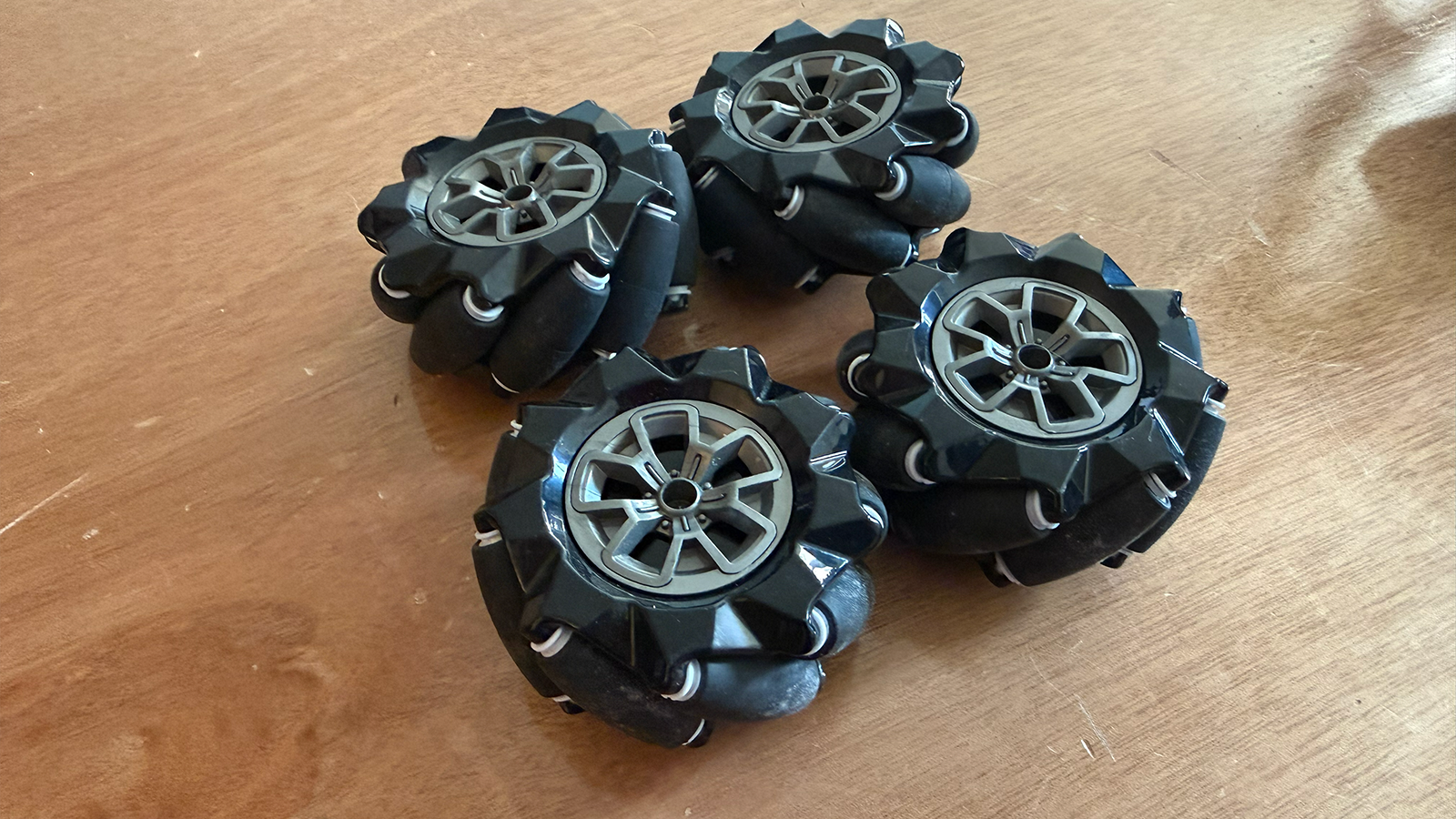
Mobility
4 mecanum wheels
Omnidirectional drive, 60 rpm max
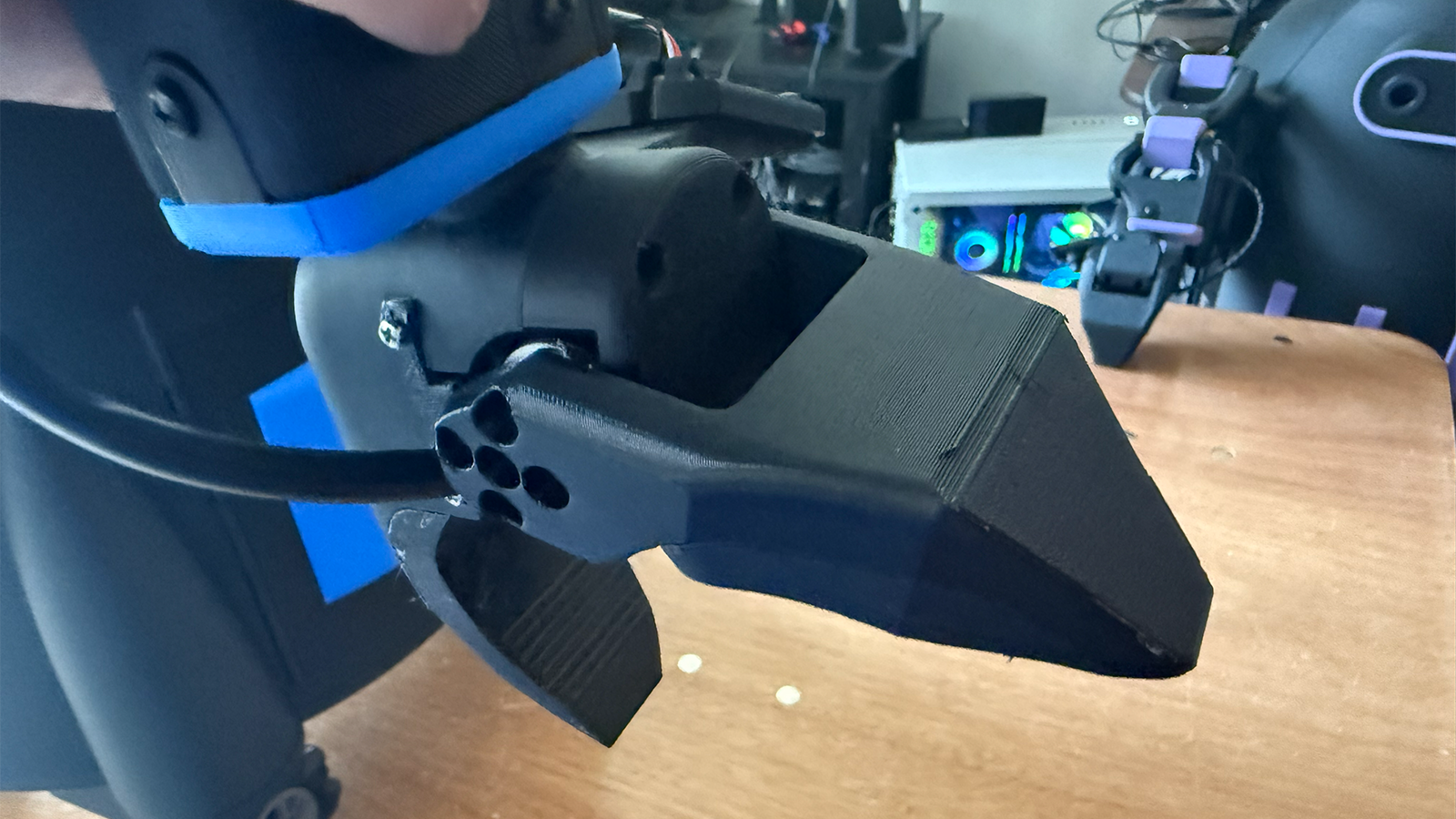
Arms
5 DOF + gripper
Per arm, 6 revolute joints
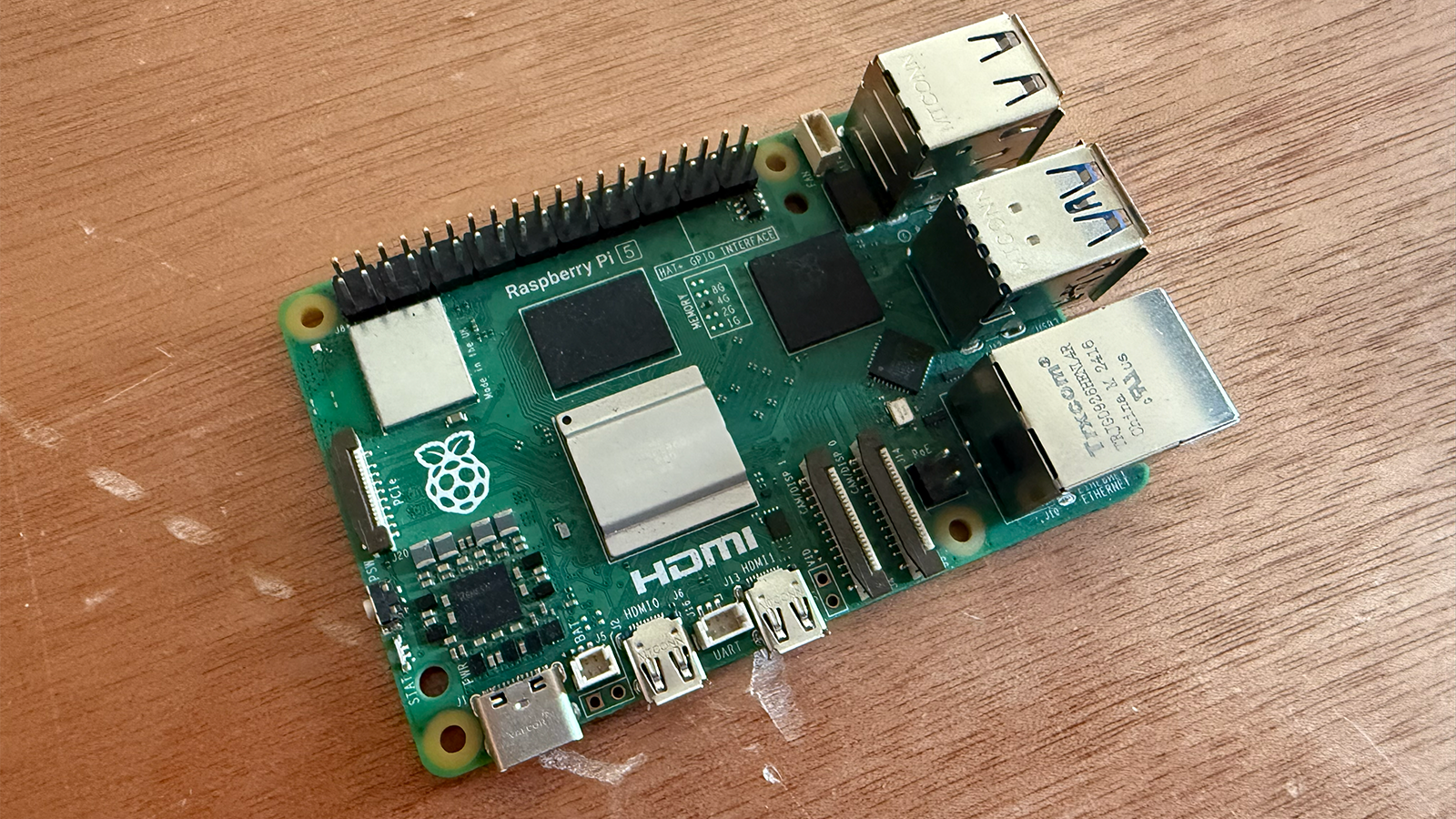
Compute
Raspberry Pi 5
5.1V regulated, PCIe USB hat
Vision
120 degree FOV
U20CAM-720p, 30 fps
Power
12V 10Ah LiFePO4
Up to 5000 cycles
Footprint
414 mm diameter
1030 mm tall, 15.88 kg

Detailed Specifications
Each module below includes the current configuration, materials, and architecture. Items marked TBD are awaiting final validation.
Mechanical Architecture
Mobility, linear actuation, and arm geometry.
Mechanical Construction
Print specs, materials, and structural design.

Assembly & Serviceability
Designed for repairability and part swaps.

Arm Actuation System
Smart servos, bus control, and end effector.

Sensing & Feedback
Core motion feedback loops.
Compute & Electronics
Processing, I/O, and networking.
Vision System
Camera placement and capture specs.

Power System
Energy storage, regulation, and protection.

Software & AI
Training, data capture, and onboard intelligence.
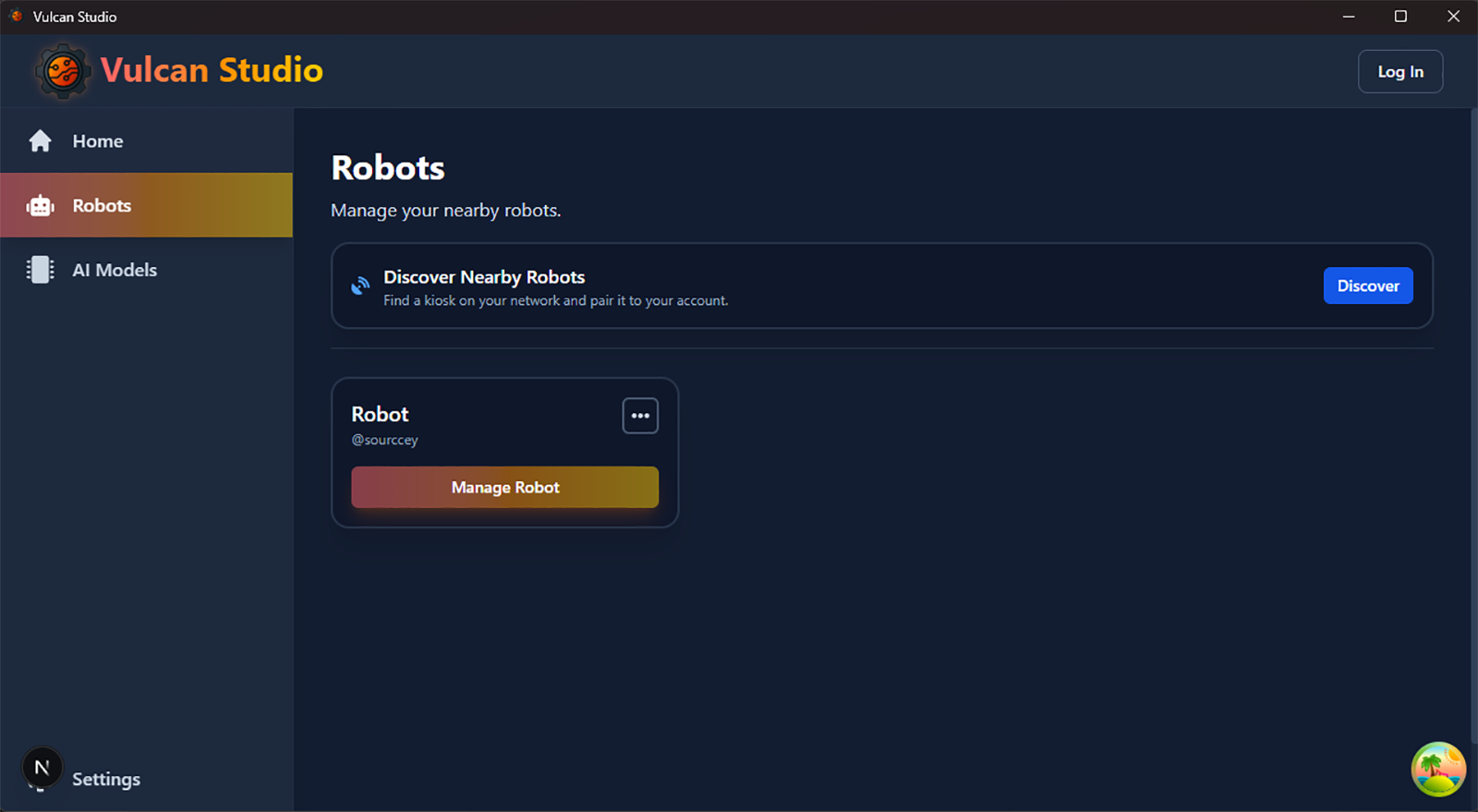
Interfacing & Control
On-robot UI, desktop tools, and teleoperation.

Calibration & Configuration
Autocalibration, zeroing, and config storage.

Physical Characteristics
Dimensions and mass.

Environmental
Operating ranges and physical requirements.

Safety & Constraints
Limits, protections, and known guardrails.
Answers for builders, tinkerers, and curious humans.
Can't find what you need? Reach out and we'll help you design your build path.
Still have questions?
Join the community or browse the repos for deeper technical details.